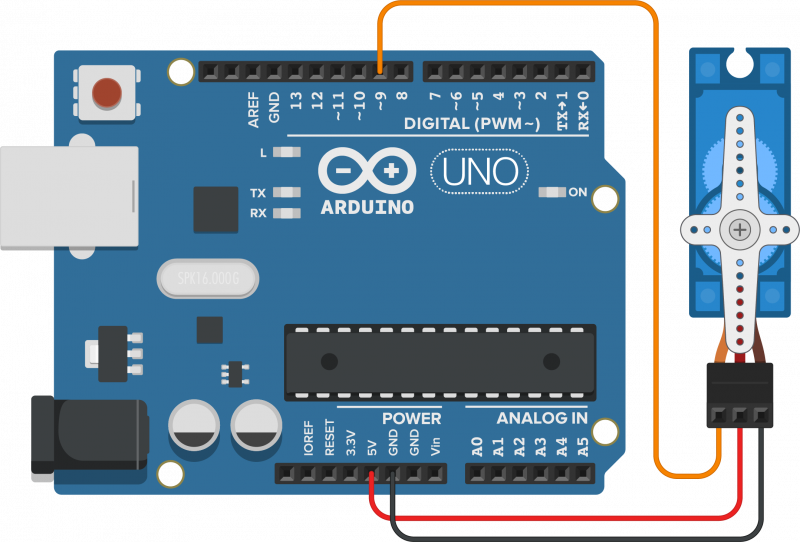
Görseldeki uygulamada servo motor 0°den 180°ye birer derece açıyla gidip aynı şekilde geri
döner. 0° ile 180° arası mesafe, bu servo motorda 300 ms sürmektedir. 300 ms’den hızlı komutlarda servo motor doğru çalışmaz.
Menülerden ”Taslak Library Ekle Servo” seçilerek programın başına eklenir. Bu programların örneğine menülerden “Dosya Örnekler Servo Sweep ve Knob” adımları izlenerek de
ulaşılabilir.
#include <Servo.h>
Servo servo; // servo isimli nesne oluşturuldu.
byte derece = 0; // Servo derecesini tutan değişken.
void setup() {
servo.attach(9); // Servo motor 9 numaralı PWM çıkışına bağlı.
}
void loop() {
for (derece = 0; derece < 180; derece += 1) { // 0°'den 180°'ye birer derece git.
servo.write(derece); // Servo motorun gideceği derece.
delay(50); // 15 ms bekle.
}
for (derece = 180; derece > 0; derece -= 1) { // 180°'den 0°'ye birer derece git
servo.write(derece);
delay(50); // 15 x 180 = 2700 ms'de 0°'den 180°'ye tamamlar.
}
}
#include <Servo.h>
Servo servo; // servo isimli nesne oluşturuldu.
void setup() {
servo.attach(9); // Servo motor 9 numaralı PWM çıkışına bağlı.
}
void loop() {
int pot = analogRead(A0); // Potansiyometrenin konumunu oku. (0 - 1023)
byte derece = map(pot, 0, 1023, 0, 180);// Servo motorun kullanacağı 0 - 180 aralığına dönüştür.
servo.write(derece); // Servo motorun gideceği derece.
delay(15);
}
No responses yet