VIDEO
#include < QTRSensors . h > //Qtr v4.0
#define AIN1 4 //A sağ motor.
#define AIN2 3
#define ENA 5
#define ENB 6 //B sol motor.
#define BIN1 7
#define BIN2 8
#define STBY 9
#define sensorSayisi 8
#define sensorOrnekSayisi 4
#define emiterPini 11
#define LED 13
int maxHiz = 70 ; // Motor pwm ayarı 0 - 255.
int hata = 0 , turev = 0 ;
float KP = 0.03 , KD = 0.5 ; // Oran (KP) ve türev (KD) sabitleri. (Her araca göre ayar yapılmalıdır.)
unsigned int pozisyon = 3500 ;
int fark = 0 ; // Motorlara uygulanan fark.
int sonHata ; // Orantılı son değer. (Hatanın türevini hesaplamak için kullanılır.)
int hedef = 3500 ; // Sensörden gelen 0 - 7000 arası değerin orta noktası.
QTRSensors qtr ; // qtr isimli nesne oluşturuldu.
unsigned int sensor [ sensorSayisi ] ;
void setup ( ) {
qtr . setTypeAnalog ( ) ; //QTR-8A ayarla. (QTR-8RC için qtr.setTypeRC() fonksiyonu kullanılır.)
qtr . setSensorPins ( ( const uint8_t [ ] ) {
A0 , A1 , A2 , A3 , A4 , A5 , A6 , A7
} , 8 ) ;
pinMode ( AIN1 , OUTPUT ) ;
pinMode ( AIN2 , OUTPUT ) ;
pinMode ( BIN1 , OUTPUT ) ;
pinMode ( BIN2 , OUTPUT ) ;
pinMode ( LED , OUTPUT ) ;
pinMode ( STBY , OUTPUT ) ;
delay ( 1000 ) ; //Araca enerji verince 1sn bekle
kalibrasyon ( 1 ) ; // 0 elle, 1 otomatik kafa sallama.
}
void loop ( ) {
sensorOku ( ) ;
pd ( ) ;
}
void sensorOku ( ) {
pozisyon = qtr . readLineWhite ( sensor ) ; // Beyaz çizginin pozisyonunu oku. (0 - 7000)
hata = pozisyon - hedef ; // Pozisyondan 3500 (hedef) çıkar. Hatayı bul.
qtr . read ( sensor ) ; // Sekiz sensörün ham değelerini oku.
}
void pd ( ) {
turev = hata - sonHata ; // Hatadan bir önceki hatayı çıkar.
sonHata = hata ; // Şimdiki hatayı kaydet.
fark = ( hata * KP ) + ( turev * KD ) ; // Motorlara uygulanacak farkı hesapla.
constrain ( fark , - maxHiz , maxHiz ) ; // fark en fazla maxHiz olsun.
if ( fark < 0 ) // fark negatif ise
motor ( maxHiz , maxHiz + fark ) ; // Sağ motorun hızını düşür.
else // fark negatif değilse
motor ( maxHiz - fark , maxHiz ) ; // Sol motorun hızını düşür.
}
void motor ( int solMotorPWM , int sagMotorPWM ) {
digitalWrite ( STBY , HIGH ) ;
if ( solMotorPWM >= 0 ) { // İleri.
digitalWrite ( BIN1 , HIGH ) ;
digitalWrite ( BIN2 , LOW ) ;
}
else { // Negatifse geri döndür.
digitalWrite ( BIN1 , LOW ) ;
digitalWrite ( BIN2 , HIGH ) ;
solMotorPWM *= - 1 ;
}
analogWrite ( ENB , solMotorPWM ) ;
if ( sagMotorPWM >= 0 ) { // İleri.
digitalWrite ( AIN1 , HIGH ) ;
digitalWrite ( AIN2 , LOW ) ;
}
else { // Negatifse geri döndür.
digitalWrite ( AIN1 , LOW ) ;
digitalWrite ( AIN2 , HIGH ) ;
sagMotorPWM *= - 1 ;
}
analogWrite ( ENA , sagMotorPWM ) ;
}
void kalibrasyon ( bool secim ) { // 1 otomatik, 0 elle.
if ( secim ) { // secim 1 ise otomatik kalibrasyon yap.
byte hiz = 40 ; // Aracın kafasını sallama hızı.
for ( byte i = 0 ; i < 3 ; i ++ ) { // Sağa sola üç kez kafa salla.
while ( sensor [ 7 ] < 300 ) {
motor ( hiz , - hiz ) ;
qtr . calibrate ( ) ;
sensorOku ( ) ;
}
while ( sensor [ 7 ] > 700 ) {
motor ( hiz , - hiz ) ;
qtr . calibrate ( ) ;
sensorOku ( ) ;
}
while ( sensor [ 0 ] < 300 ) {
motor ( - hiz , hiz ) ;
qtr . calibrate ( ) ;
sensorOku ( ) ;
}
while ( sensor [ 0 ] > 700 ) {
motor ( - hiz , hiz ) ;
qtr . calibrate ( ) ;
sensorOku ( ) ;
}
while ( sensor [ 3 ] > 500 ) { // Ortada dur.
motor ( hiz , - hiz ) ;
qtr . calibrate ( ) ;
sensorOku ( ) ;
}
}
} else { // secim 0 ise elle kalibrasyon yap.
for ( byte i = 0 ; i < 70 ; i ++ ) { // Dahili LED yanıp söndüğü sürece (3 sn) elle kalibrasyon yap.
digitalWrite ( LED , HIGH ) ; delay ( 20 ) ;
qtr . calibrate ( ) ;
digitalWrite ( LED , LOW ) ; delay ( 20 ) ;
qtr . calibrate ( ) ;
}
}
motor ( 0 , 0 ) ;
delay ( 2000 ) ; // Kalbirasyondan sonra 3 sn bekle.
}
dav 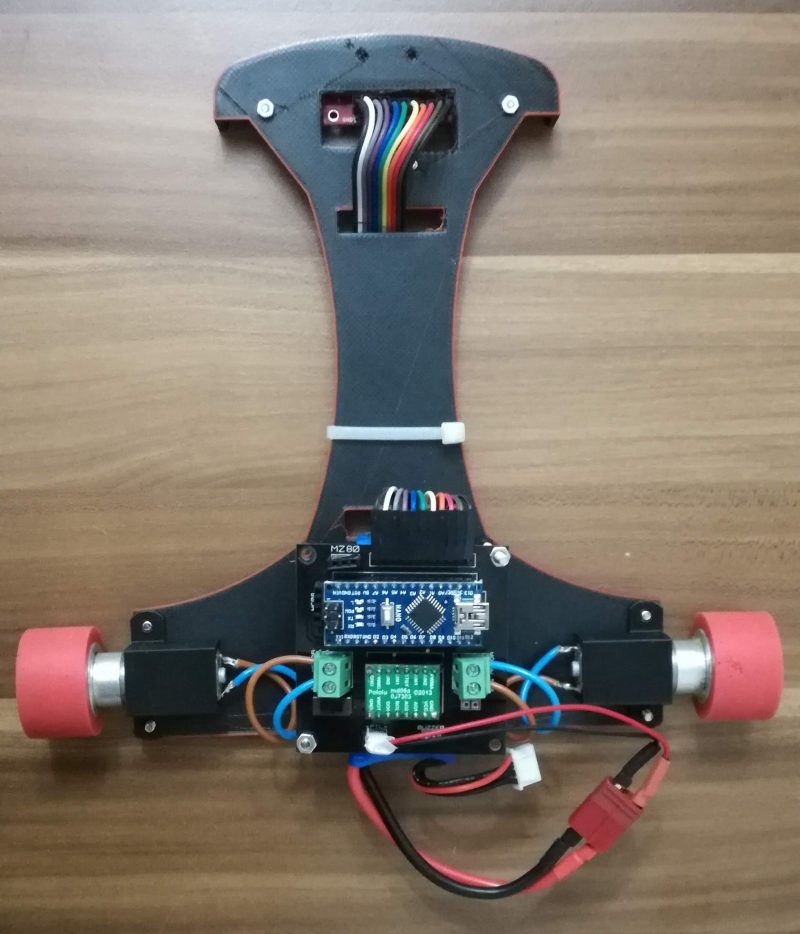
16 Responses
Merhaba hocam. Öncelikle böylesine güzel bilgileri paylaştığınız için teşekkür ederiz. Lipo pillerden gelen gerilimi 5V a dönüştürmek için Voltaj regülatörü kullanmak gerekir mi? Siz bu devrede kullanmamışsınız sanırsam
Evet bu devrede kullanmamıştım. ancak kullanmak gerekir.
merhabalar acaba nasıl siyah çizgi izletebilirim?
qtr.readLineWhite
komutu yerine
qtr.readLineBlack
kullanarak.
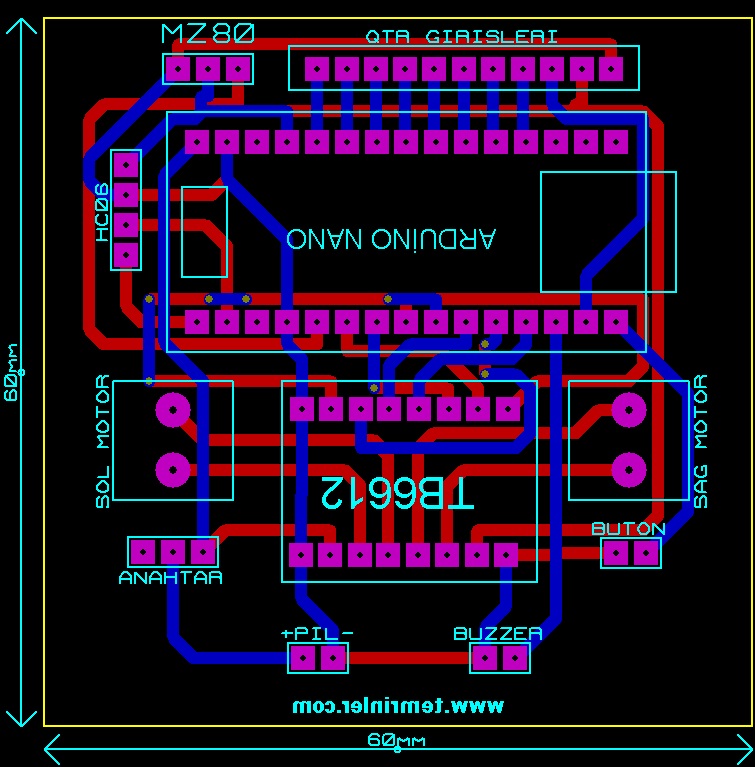
Hocam iyi günler devre şemasını nerde bulabilirm acaba
kod hata veriyor
hata nedir? kütüphane yüklenmemiş olabilir.
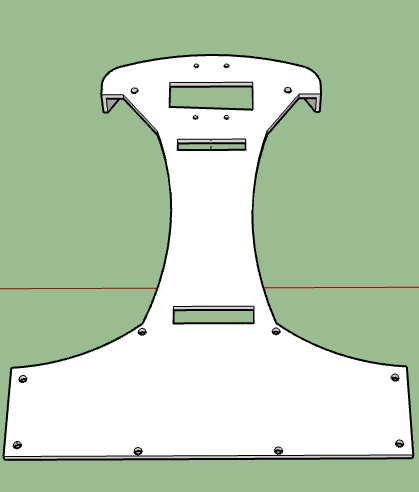
merhabalar robotun 3d model dosyasını atabilirmsiniz ?
Ekledim.
Merhabalar Hocam!
Öncelikle bu şekilde verimli ve faydalı paylaşımları yaptığınız için teşekkür ederim.
Yukarıda paylaştığınız proteus görüntüsünün pin girişleri yazılı olan şekli varmı? ve L298N motor sürücülü şeklinde uyarlanması nasıl yapılabilir?
Bu noktada yardımcı olursanız sevinirim.
İyi çalışmalar.
MERABA İYİ GÜNLER
http://www.temrinler.com/wp-content/uploads/2018/12/cizgi_izleyen-400×406.jpg
ACABA BU ŞEMANIN SİZDE YAPILMIŞ HALİ VARMI
BÜTÜN PARCALARIYLA YADA SADECE KARTI DA OLABİLİR FİYATI NEDİR ACABA ÖĞRENEBİLİRMİYİM.
Merhaba evet iki adet lehimlenmiş olarak var. kart 50TL, parçalarla birlikte (nano ve tb6612 dahil) 120tl.
http://www.temrinler.com/?attachment_id=4559
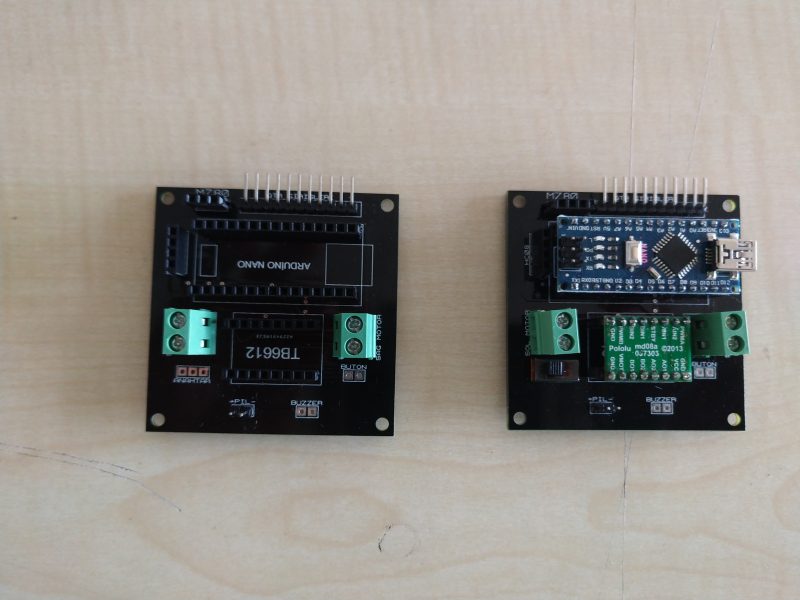
iyi günler kartın lehimsiz hali ne kadardır acaba
Şuan elimdekileri lehimledim. header’ları taktım. Malzemesiz kart 50tl.
Kolay gelsin
Acaba bu devre kartinin 2 yüzünün de dosyasi var mi siz de? Eger varsa paylasabilir misiniz?
Iyi çalışmalar
Merhaba yukarıda dosyanın bağlantısı var indirebilirsiniz